

소개
머신 비전 시스템을 설계하는데 있어서, 가장 핵심적인 요소는 검사 대상의 이미지를 캡처하는 광학계입니다.
카메라의 선택, 렌즈의 유형 및 설정, 그리고 조명 조건 등은 광학계의 구성요소로, 이들의 적절한 결합이 필요합니다. 그렇지 않으면, 이미지 품질이 저하되거나 중요한 정보가 손실될 수 있습니다.
특히, 렌즈 설정은 이미지의 해상도, 명도, 초점 깊이 등에 큰 영향을 미치므로, 정확한 파라미터 설정이 중요합니다.
이렇게 얻은 이미지 데이터를 통해 필요한 특징을 추출하고 분류하는 알고리즘이 개발되고, 이는 머신 비전 시스템 성능에 직접적인 영향을 미칩니다.
결국, 광학계 설계는 머신 비전 시스템 성능을 결정짓는 핵심 요소라 할 수 있습니다.
렌즈의 구성과 왜곡의 종류
먼저, 렌즈에 대해 살펴보겠습니다. 렌즈는 여러 렌즈 요소들이 결합되어 만들어진 것입니다. 각 요소들은 빛의 경로를 정밀하게 조정하여, 디지털 센서가 이미지를 가장 정확하게 재현할 수 있도록 돕습니다.
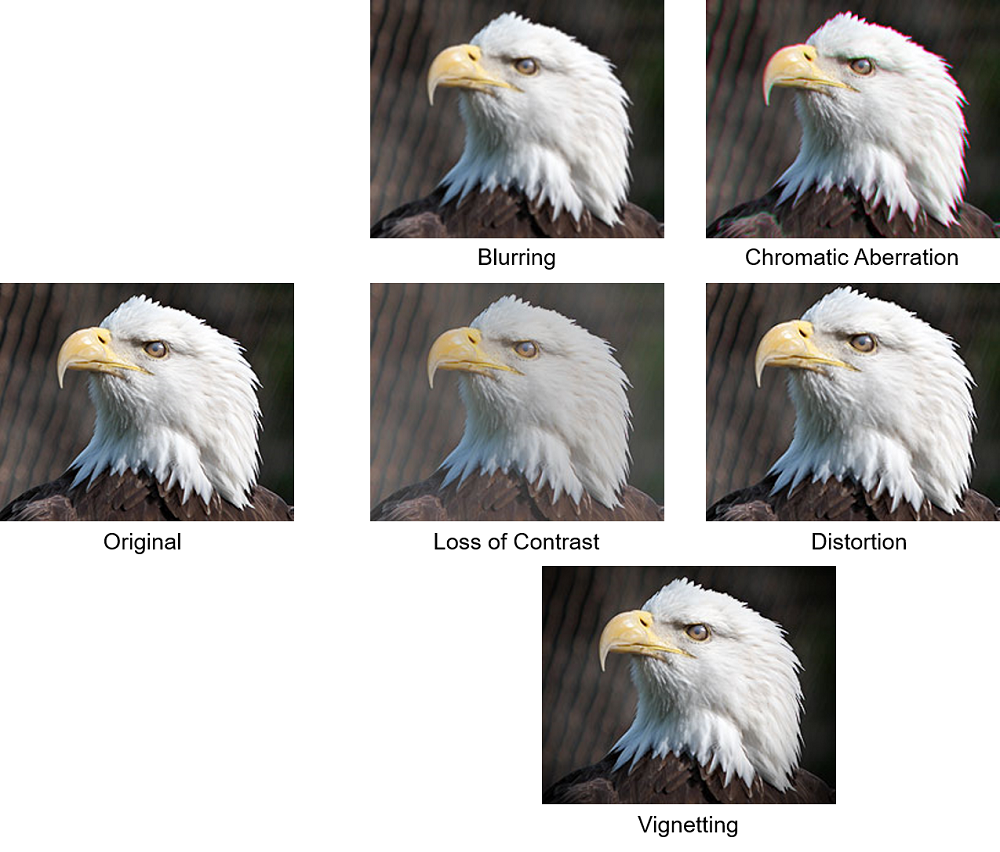
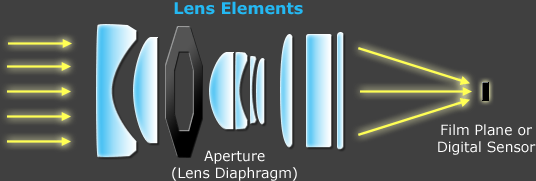 렌즈를 통과한 뒤에도 이미지의 포인트가 단일 포인트로 재조정되지 않는 경우, 이를 광학 수차라고 합니다. 광학 수차는 이미지의 흐림, 낮은 대비, 색상 이상 등의 현상으로 나타납니다. 또한, 중심에서 멀어질수록 감소하는 비네팅 현상이나 왜곡도 발생할 수 있습니다.
렌즈를 통과한 뒤에도 이미지의 포인트가 단일 포인트로 재조정되지 않는 경우, 이를 광학 수차라고 합니다. 광학 수차는 이미지의 흐림, 낮은 대비, 색상 이상 등의 현상으로 나타납니다. 또한, 중심에서 멀어질수록 감소하는 비네팅 현상이나 왜곡도 발생할 수 있습니다.
| 효과 | 설명 |
|---|---|
| Blurring | 초점이 정확히 맞지 않아 선명하지 않은 현상 |
| Chromatic Aberration | 파장대 별로 초점 위치가 정확히 맞지 않아 번지는 현상 |
| Loss of Contrast | 대비가 좋지 않은 현상 |
| Distortion | 중심에서 멀어질수록 왜곡 지는 현상 |
| Vignetting | 중심에서 멀어질수록 어두워지는 현상 |
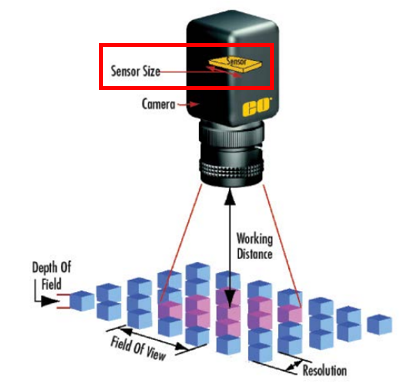
1. FOV [Field Of View]
카메라 렌즈로 보는 실제 영역 (영상을 획등하고자 하는 영역)
구성된 광학계로 얻을 수 있는 가로(H) 또는 세로(V) 영역을 의미합니다. 공식으로는 아래처럼 나타낼 수 있습니다.

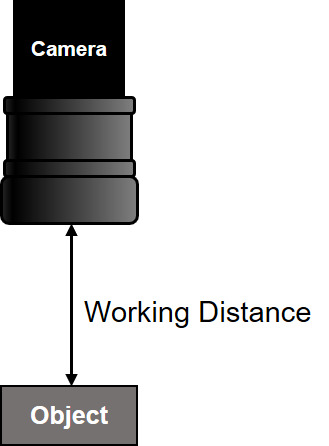
2. WD [Working Distance]
렌즈의 앞면에서 오프젝트(대상) 까지의 거리
3. 광학 배율(Magnification)
위 FOV 공식에서 알 수 있듯이, 광학 배율은 아래처럼 나타낼 수 있습니다.

4. DOF [Depth Of Field]
‘심도’ 라는 뜻이며, 오브젝트의 초점이 맞는 범위
피사계 심도(Depth of Focus, DOF)와 허용 착란원(Circle of Confusion, COC)

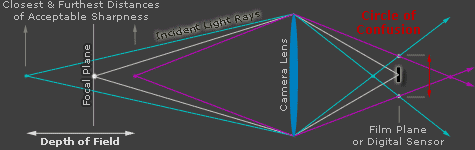
이렇게 초점이 선명해지는 분명한 변환 지점이 없다 보니 ‘허용 착란원(Circle of Confusion, COC)‘이라는 용어를 사용하여 흐림의 정도를 정의합니다.
5. 초점 거리(Focal Length)
물체에 반사된 빛이 렌즈를 통과하면 빛이 모아집니다. 이때, 빛이 모아져 상을 형성하는 지점을 초점(Focus)이라고 하며, 상이 맺히는 센서와의 거리를 초점 거리라고 합니다.

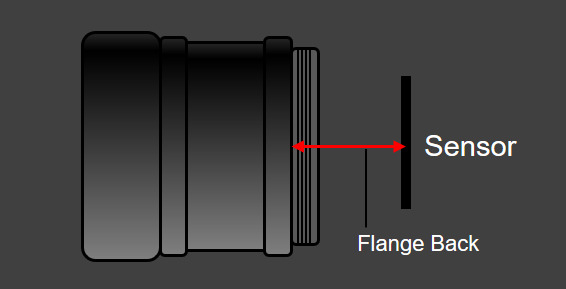
6. 플랜지 백(Flange Back)
| 마운트 | 플랜지 백 (Flange Back) |
|---|---|
| CS-Mount | 12.526 mm |
| C-Mount | 17.526 mm |
| F-Mount | 46.5 mm |
| M42-Mount | 제조사에 따라 상이 |
| M72-Mount | 제조사에 따라 상이 |
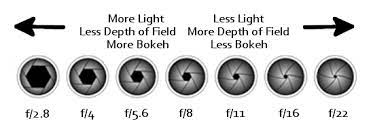
7. F-Number (F/#)

| F/# | 조리개 크기 | 셔터 스피드 | 피사계 심도 |
|---|---|---|---|
| 높음 | 작아짐 | 느려짐 | 넓어짐 |
| 낮음 | 커짐 | 빨라짐 | 좁아짐 |
8. 센서 크기
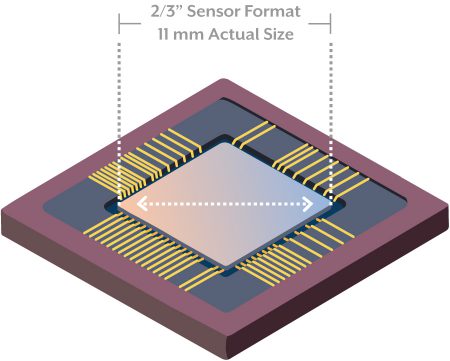
위 사진은 2/3” 포맷으로 분류된 CMOS 센서의 예시입니다. 실제 1인치의 길이는 25.4mm이고 2/3인치의 길이는 16.93mm입니다. 하지만 2/3인치 센서의 실제 대각선 길이는 11mm입니다. 이상하죠? 1”, 1/1.8”등 다른 크기들도 마찬가지입니다. 현재 센서의 “인치”는 실제 센서의 대각선 크기를 의미하지 않습니다. 센서의 인치 측정은 구형 비디오 카메라 튜브를 기반으로 하게 됩니다. 1950년대부터 TV 카메라 튜브로 CCD 센서를 측정했던 것이 지금까지 내려오게 된 것입니다. 즉, 센서 사양의 “인치”는 센서의 대각선 크기가 아니라 튜브의 긴 유리 외경을 의미합니다.
| 타입 | Aspect 비율 | 실제 길이(mm) | 센서 대각선 길이(mm) |
|---|---|---|---|
| 1/1.8” | 4:3 | 14.111 | 8.93 |
| 2/3” | 4:3 | 16.933 | 11 |
| 1” | 4:3 | 25.400 | 16 |
| 4/3” | 4:3 | 33.867 | 22.5 |
9. P.R [Pixel Resolution]
‘분해능’ 이라는 뜻이며, 카메라 센서 속 하나의 Pixel이 보는 단위 (이 값이 낮을수록 정밀한 영상 획득이 가능)
10. Pixel Size
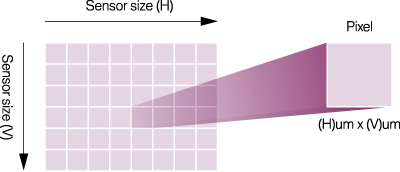
카메라 센서 속 하나의 Pixel의 크기 (단위: ㎛, 마이크로미터)
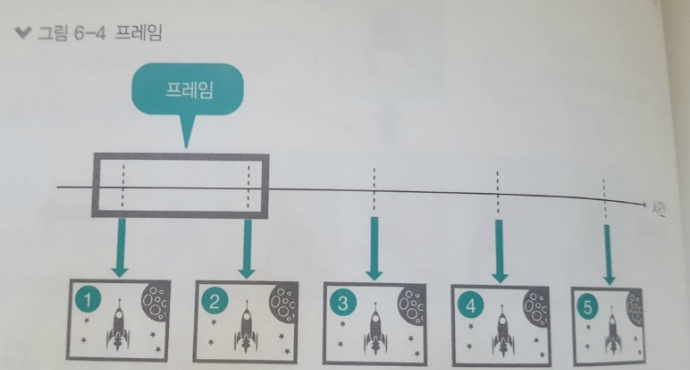
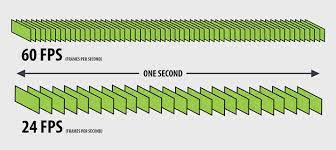
11. Frame
영상 정보의 단위, 1개의 영상(이미지)을/를 1 프레임이라고 함
12. Frame Rate
흔히 ‘Fps’ 로 표기하며, 초당 전송하는 영상(이미지)의 개수
13. Sensor Size
카메라 센서의 물리적인 크기
14. FFD [Flange Focal Distance]
렌즈 마운트 뒷면에서 센서까지의 거리 (Flange Back이라고도 함)
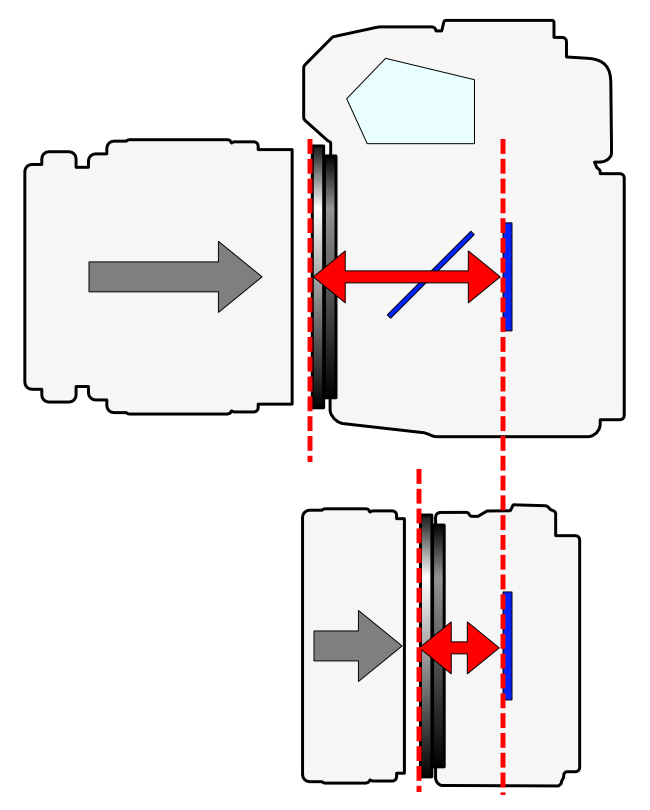
15. Back Focus
렌즈 글라스 뒷면에서 센서까지의 거리
16. F no
렌즈의 밝기 값으로 낮을수록 렌즈의 밝기 값이 높음
17. Vignetting
보통 ‘비네팅’ 으로 읽으며, 렌즈가 센서 크기를 커버하지 못하여 영상 사이드에 발생하는 가림 현상

18. O/I [Object to Imager]
오브젝트(대상) 에서 카메라 센서까지의 거리
19. Mono
흑백 또는 단색 영상, 8-Bit 데이터 기준으로 0 값에 가까울수록 어둡고, 255 값에 가까울수록 밝음
20. Color
빛의 삼원색인 RGB(Red, Green, Blue = 3-Band)영상, 대표적으로 24-bit 컬러 데이터는
RGB(28, 28, 28)의 값으로 표현됨
21. Dynamic Range
측정 가능한 빛의 최대-최저 비율이며, 값이 높을 수록 표현 범위가 넓음 (단위: ㏈, 데시벨)

22. Line
픽셀의 행 단위로, 일반적으로 라인 스캔 카메라에서 사용되는 용어
23. Line Rate
초당 전송하는 라인의 개수, 라인이 쌓여서 완성된 프레임의 속도 또한 fps로 표시
마지막 정리
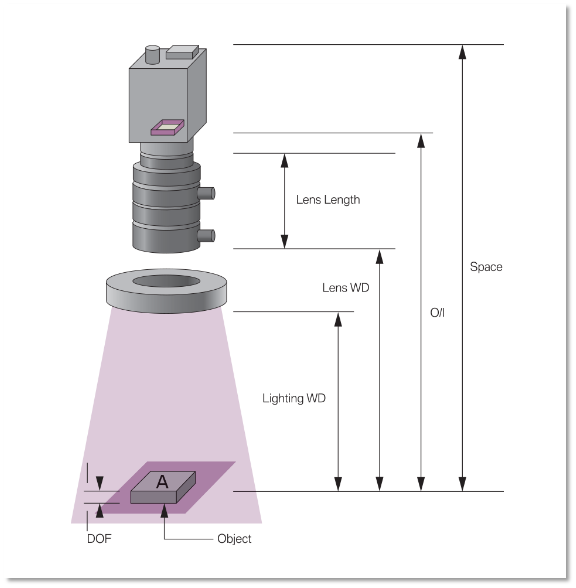
| 용어 | 설명 |
|---|---|
| Space | 카메라 외형 끝에서 오브젝트까지의 총 구간 거리 |
| O/I (Object to Imager) | 카메라 센서와 물체까지의 거리 |
| WD (Working Distance) | 렌즈 끝에서 물체까지의 거리 (Lens WD) |
| LWD (Lighting Working Distance) | 조명 끝에서 물체까지의 거리 |
| FOV (Field Of View) | 영상을 획득하고자 하는 영역 |
| DOF (Depth Of Field) | 심도, 렌즈의 초점이 맞는 범위 |